I was, FINALLY, able to almost correctly calibrate de Kinect. After noticing that the error was mostly in the X direction and that the RGB image and the point cloud where not completely overlapping I considered that the error could be in the RGB and Depth intrinsic calibration of the camera. The process of the intrinsic calibration was redone, the depth_registration parameter to launch the drivers of the Kinect was set to False and the the other launch files were changed so the drivers of the Kinect were the last thing to be launched.
This are the results of the first calibration after applying this alterations.

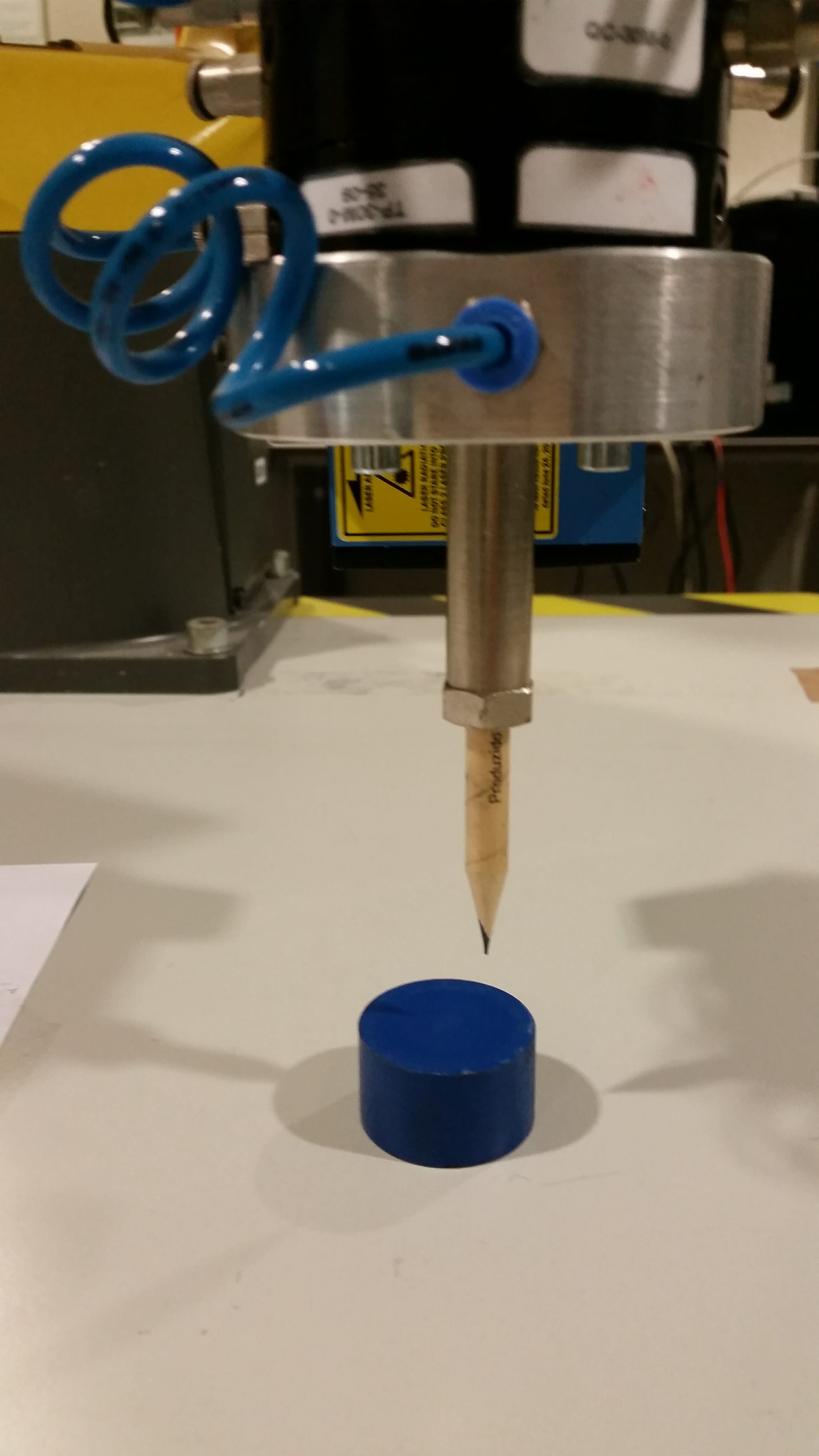
| The X direction | The Y direction |
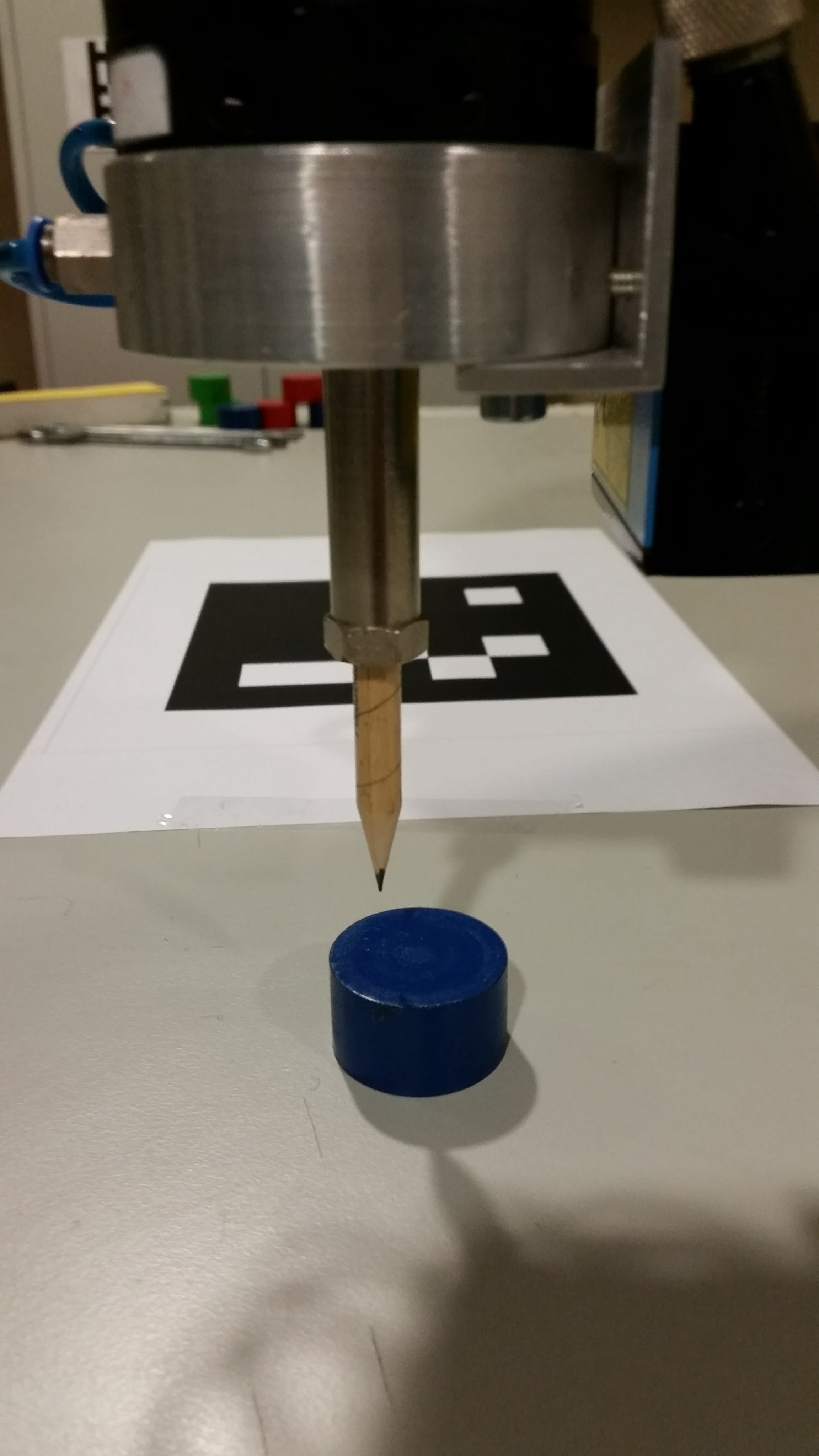
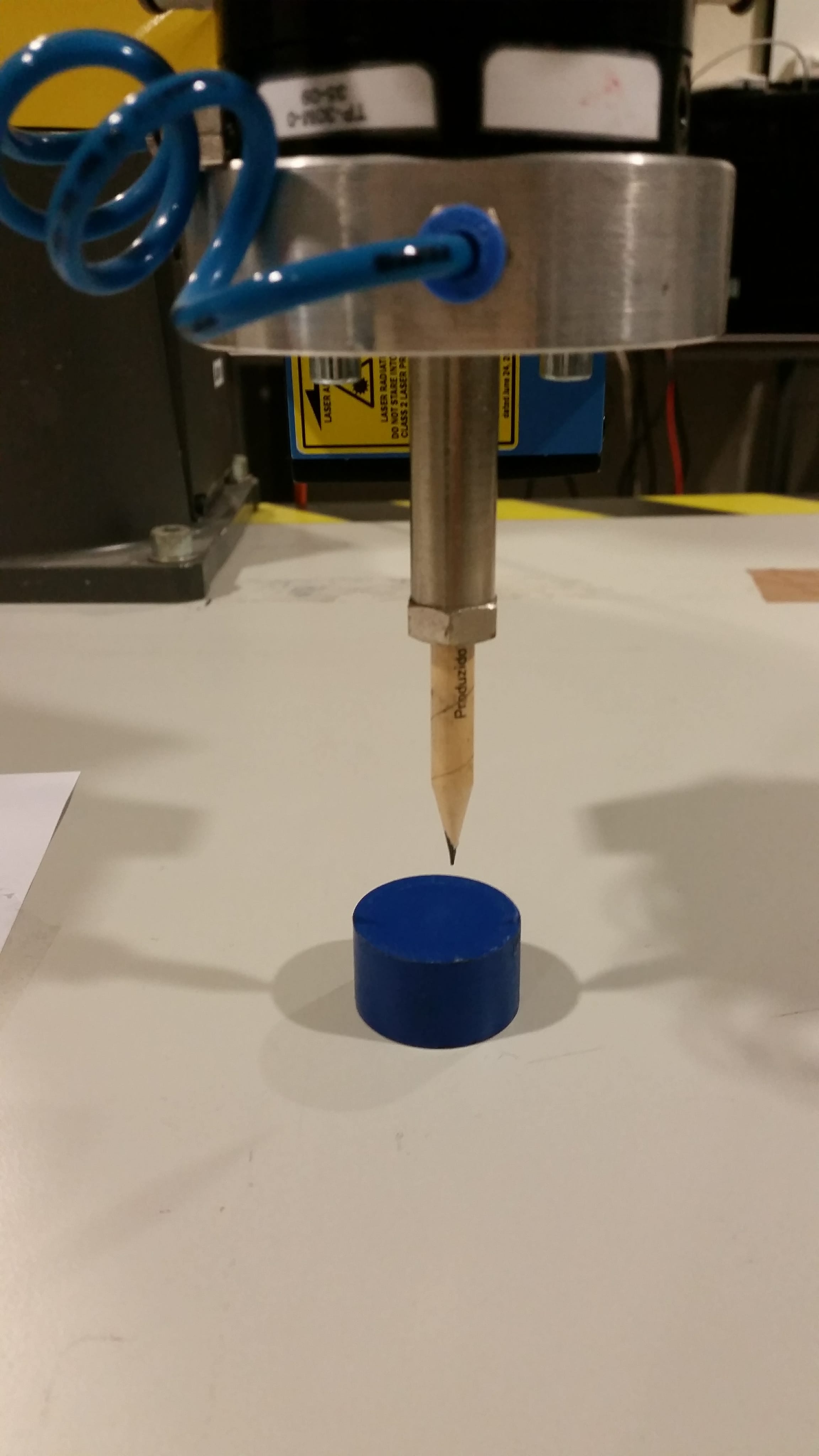
| The X direction | The Y direction |
More calibrations will be done to reach the most suitable transformation.